Multimedia Signal Processing
Audio Effects
Thorsten Thormählen
June 17, 2024
Part 4, Chapter 1
Thorsten Thormählen
June 17, 2024
Part 4, Chapter 1
This is the print version of the slides.
Advance slides with the → key or
by clicking on the right border of the slide
Slides can also be advanced by clicking on the left or right border of the slide.
| Type | Font | Examples |
|---|---|---|
| Variables (scalars) | italics | $a, b, x, y$ |
| Functions | upright | $\mathrm{f}, \mathrm{g}(x), \mathrm{max}(x)$ |
| Vectors | bold, elements row-wise | $\mathbf{a}, \mathbf{b}= \begin{pmatrix}x\\y\end{pmatrix} = (x, y)^\top,$ $\mathbf{B}=(x, y, z)^\top$ |
| Matrices | Typewriter | $\mathtt{A}, \mathtt{B}= \begin{bmatrix}a & b\\c & d\end{bmatrix}$ |
| Sets | calligraphic | $\mathcal{A}, B=\{a, b\}, b \in \mathcal{B}$ |
| Number systems, Coordinate spaces | double-struck | $\mathbb{N}, \mathbb{Z}, \mathbb{R}^2, \mathbb{R}^3$ |
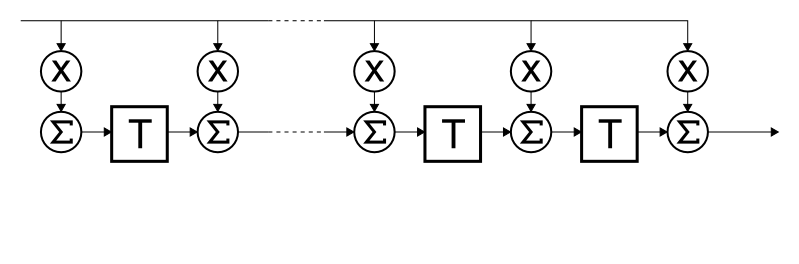
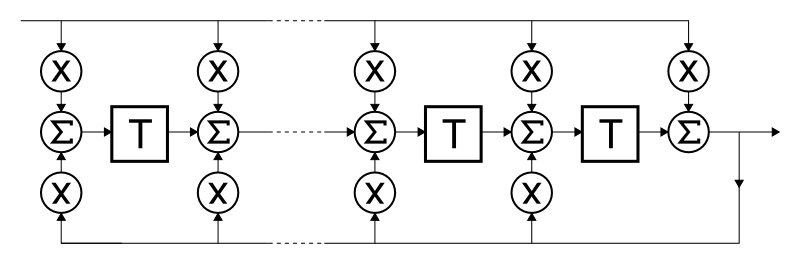
| FIR Filters | IIR Filters |
|---|---|
| More coefficients | less coefficients |
| Higher computational effort | Lower computational effort |
| Higher memory requirement | Lower memory requirement |
| Always stable | Possibly unstable |
| Rounding errors are not a problem | Rounding errors may have a large effect due to feedback |
| Linear phase or zero phase is easy to realize | Phase is distorted non-linearly |
Please notify me by e-mail if you have questions, suggestions for improvement, or found typos: Contact