Technische Informatik
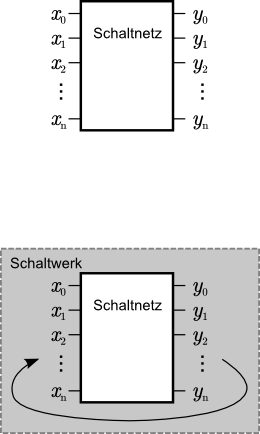
Sequentielle Schaltungen
Thorsten Thormählen
07. Dezember 2021
Teil 7, Kapitel 3
Thorsten Thormählen
07. Dezember 2021
Teil 7, Kapitel 3
Dies ist die Druck-Ansicht.
Weiterschalten der Folien durch die → Taste oder
durch das Klicken auf den rechten Folienrand.
Das Weiterschalten der Folien kann ebenfalls durch das Klicken auf den rechten bzw. linken Folienrand erfolgen.
| Typ | Schriftart | Beispiele |
|---|---|---|
| Variablen (Skalare) | kursiv | $a, b, x, y$ |
| Funktionen | aufrecht | $\mathrm{f}, \mathrm{g}(x), \mathrm{max}(x)$ |
| Vektoren | fett, Elemente zeilenweise | $\mathbf{a}, \mathbf{b}= \begin{pmatrix}x\\y\end{pmatrix} = (x, y)^\top,$ $\mathbf{B}=(x, y, z)^\top$ |
| Matrizen | Schreibmaschine | $\mathtt{A}, \mathtt{B}= \begin{bmatrix}a & b\\c & d\end{bmatrix}$ |
| Mengen | kalligrafisch | $\mathcal{A}, B=\{a, b\}, b \in \mathcal{B}$ |
| Zahlenbereiche, Koordinatenräume | doppelt gestrichen | $\mathbb{N}, \mathbb{Z}, \mathbb{R}^2, \mathbb{R}^3$ |

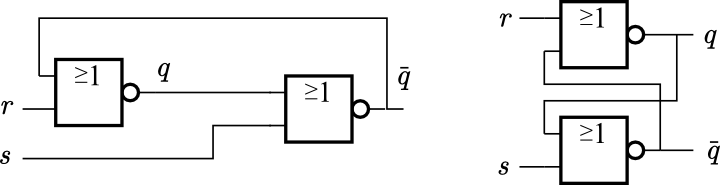
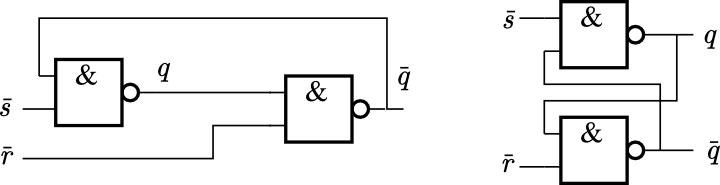
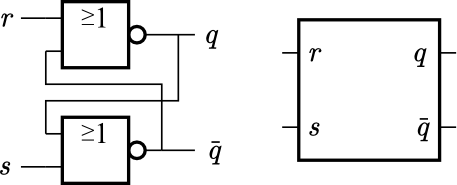
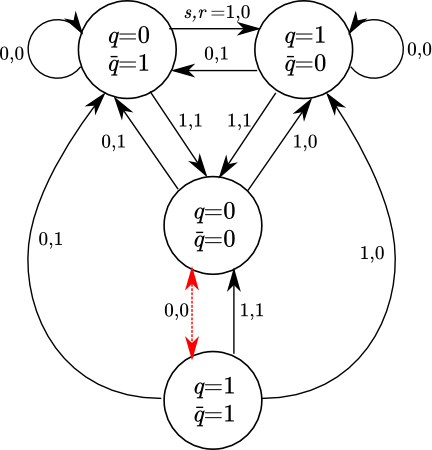
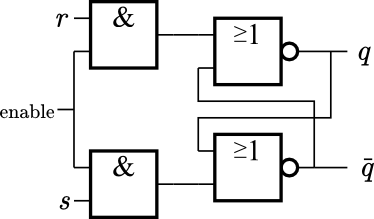
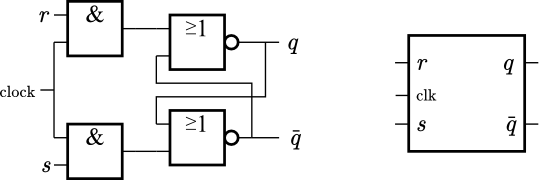
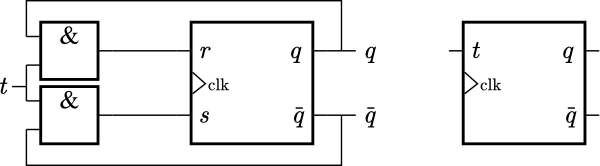
| $r$ | $s$ | $q_{t-1}$ | $q$ | Funktion |
| 0 | 0 | 0 | 0 | halten |
| 0 | 0 | 1 | 1 | halten |
| 0 | 1 | 0 | 1 | setzen |
| 0 | 1 | 1 | 1 | setzen |
| 1 | 0 | 0 | 0 | rücksetzen |
| 1 | 0 | 1 | 0 | rücksetzen |
| 1 | 1 | 0 | x | illegal |
| 1 | 1 | 1 | x | illegal |

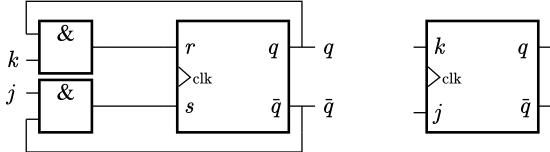
| $k$ | $j$ | $q_{t-1}$ | $q$ | Funktion |
| 0 | 0 | 0 | 0 | halten |
| 0 | 0 | 1 | 1 | halten |
| 0 | 1 | 0 | 1 | setzen |
| 0 | 1 | 1 | 1 | setzen |
| 1 | 0 | 0 | 0 | rücksetzen |
| 1 | 0 | 1 | 0 | rücksetzen |
| 1 | 1 | 0 | 1 | umschalten |
| 1 | 1 | 1 | 0 | umschalten |

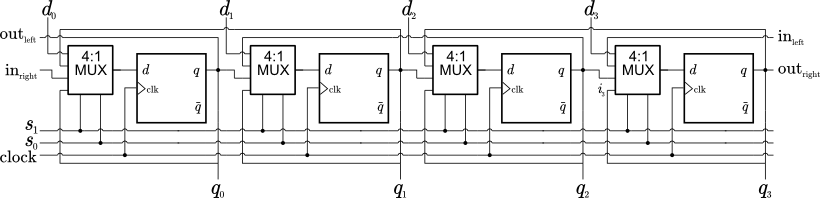
| $s_1$ | $s_0$ | Funktion |
| 0 | 0 | laden |
| 0 | 1 | links schieben |
| 1 | 0 | rechts schieben |
| 1 | 1 | halten |



Anregungen oder Verbesserungsvorschläge können auch gerne per E-mail an mich gesendet werden: Kontakt