Technische Informatik I
Mikrocode-basierter CPU-Simulator
Thorsten Thormählen
26. Januar 2021
Teil 9, Kapitel 1
Steuerungstasten
→ nächste Folie (auch
Enter oder
Spacebar).
← vorherige Folie
d schaltet das Zeichnen auf Folien ein/aus
p wechselt zwischen Druck- und Präsentationsansicht
CTRL + vergrößert die Folien
CTRL - verkleinert die Folien
CTRL 0 setzt die Größenänderung zurück
Das Weiterschalten der Folien kann ebenfalls durch das Klicken auf den rechten bzw. linken Folienrand erfolgen.
Notation
| Typ |
Schriftart |
Beispiele |
| Variablen (Skalare) |
kursiv |
$a, b, x, y$ |
| Funktionen |
aufrecht |
$\mathrm{f}, \mathrm{g}(x), \mathrm{max}(x)$ |
| Vektoren |
fett, Elemente zeilenweise |
$\mathbf{a}, \mathbf{b}= \begin{pmatrix}x\\y\end{pmatrix} = (x, y)^\top,$ $\mathbf{B}=(x, y, z)^\top$ |
| Matrizen |
Schreibmaschine |
$\mathtt{A}, \mathtt{B}= \begin{bmatrix}a & b\\c & d\end{bmatrix}$ |
| Mengen |
kalligrafisch |
$\mathcal{A}, B=\{a, b\}, b \in \mathcal{B}$ |
| Zahlenbereiche, Koordinatenräume |
doppelt gestrichen |
$\mathbb{N}, \mathbb{Z}, \mathbb{R}^2, \mathbb{R}^3$ |
CPU-Simulator
- In diesem Kapitel wird anhand eines vereinfachten Modells die Funktionsweise einer CPU (Central Processing Unit) erläutert
- Das Modell hat nur geringe Ähnlichkeit mit existierenden Prozessoren
- Trotzdem ist es voll funktionsfähig
- Dieses Modell-CPU entstand im Rahmen von Vorlesungen, die Peter Gumm und Manfred Sommer hier in Marburg gehalten haben
- Von Martin Perner wurde ein entsprechendes Simulationsprogramm namens MikroSim erstellt, das lange in dieser Vorlesung eingesetzt wurde:
MikroSim
- Das Modell und Programm wurden 1995 auf der CeBit vorgestellt:
- H. Peter Gumm, Martin Perner: Der Mikrocodesimulator MicroSim. CeBit 1995
- Seit WS 2013/14 werden in der Vorlesung und der Übung eine alternative Implementierung in Form einer
Web-Applikation eingesetzt:
CPU-Simulator
CPU-Simulator
- Die wichtigsten Einzelteile, aus denen eine CPU aufgebaut ist, wurden bereits besprochen:
- ALU (Arithmetic Logic Unit)
- Register
- Speicher
- Diese Komponenten sind durch Leitungen verbunden, die durch steuerbare Schalter geöffnet oder geschlossen werden können.
- Das Öffnen und Schließen dieser Schalter muss in einer zeitlichen Abfolge koordiniert werden
- Daher besitzt eine CPU zunächst einen Taktgeber, der die Zeit in einzelne Takte unterteilt
- Diese Takte sind sehr kurz, bei einem 1-GHz-Prozessor dauert ein Takt 10–9s, also eine Nanosekunde
- In den folgenden Folien wird eine sehr einfache, idealisierte Definition eines CPU-Taktes beschrieben
- Was genau in einem Takt passiert kann bei realen Prozessoren sehr unterschiedlich sein
Takt und Takt-Phasen
- Jede Operation der CPU benötigt einen Takt
- Für eine einfache Operation, wie etwa die Addition zweier Registerinhalte, werden dazu drei Phasen benötigt:
- Phase 1: Hol-Phase (engl. "fetch")
Holt die Argumente aus den Registern und stelle sie der ALU bereit
- Phase 2: Rechenphase (engl. "execute")
Führt die ALU-Operation durch
- Phase 3: Bring-Phase (engl. "store")
Speichert das Ergebnis in ein Register
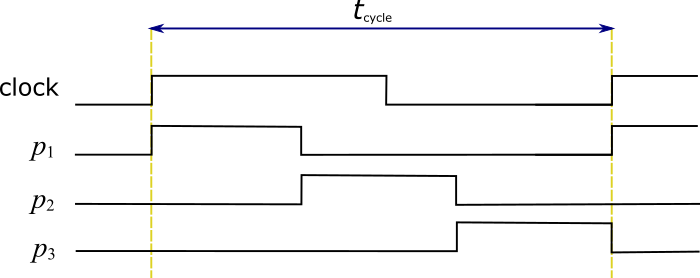
Takt-Phasen
- Bei unserer Modell-CPU müssen für jede dieser Phasen gewisse Schalter geöffnet, andere wieder geschlossen werden
- Daher arbeitet die CPU intern mit drei Phasen-Steuersignalen $p_1$, $p_2$, $p_3$, die abwechselnd auf 1, dann wieder auf 0 gesetzt werden
- In Phase $i$ ist $p_i = 1$, alle anderen $p_{j\ne i} = 0$
Steuerbare Schalter
- Damit die Datenleitungen zur richtigen Zeit offen bzw. geschlossen sind,
werden sie durch Schalter gesichert, die nur für eine bestimmte Phase geöffnet werden können
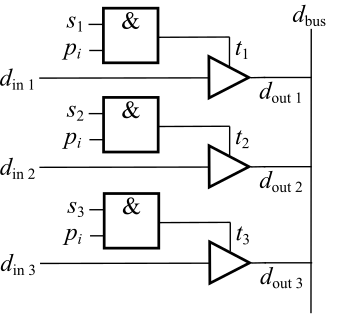
- Ein solcher Schalter könnte z.B. durch ein UND-Gatter mit 3 Eingängen realisiert werden
-
Dieser Schalter würde nur bei gesetztem Steuersignal $s = 1$ und nur in Phase $i$
(d.h. $p_i = 1$) die Daten vom Eingang $d_\mbox{in}$
an den Ausgang $d_\mbox{out}$ weiterleiten
- In der Praxis werden zum Ansteuern von Datenleitungen auch gerne so genannte Tristate Buffer eingesetzt, die eine
Datenleitung bei $t=0$ hochohmig schalten. D.h. es gibt 3 Zustände am Ausgang: 0, 1 und hochohmig.
Mikrobefehl
- In unserer beispielhaften Modell-CPU finden sich zahlreiche der eben beschriebenen Schalter
- Diese bleiben für einen Takt lang in einer bestimmten Einstellung und sind ggf. in bestimmten Phasen des Taktes offen
- Die Stellung eines Schalters wird durch sein Steuersignal $s_j$ definiert
- In einem so genannten Mikrobefehlswort oder Mikrobefehl wird die Stellung vieler Schalter bzw. Steuersignale zusammengefasst
- Eine Folge von Mikrobefehlen wird auch als Mikrocode bezeichnet
- Ein Mikrobefehlswort bleibt einen Takt lang gültig und steuert in diesem Takt die Arbeitsweise der CPU
- In unserer Modell-CPU besteht jedes Mikrobefehlswort aus genau 48 Bits: $s_1, s_2, \dots, s_{48}$
- Die Bedeutung dieser 48 Bits werden auf den folgenden Folien schrittweise erläutert
Register und Busse
- Register enthalten Datenworte, d.h. aus mehreren Bits bestehende Daten
- In unserer Modell-CPU werden Register als farbige Rechtecke dargestellt
- Wir beschreiben eine 16-Bit-Architektur, so dass alle Register 16 Bit breit sind
- Der Registerinhalt wird jeweils über eine 4-stellige Hexadezimal-Zahl dargestellt
- Datenleitungen verbinden Register miteinander
- Bei einem Registertransfer werden die entsprechenden Bits von Quell- und Zielregister durch parallele Leitungen (Datenbus) verbunden
- In unserer Modell-CPU wird der Datenbus zwischen zwei Registern als eine etwas dickere Linie mit einem Pfeil dargestellt, der die Richtung
des Datentransfers anzeigt
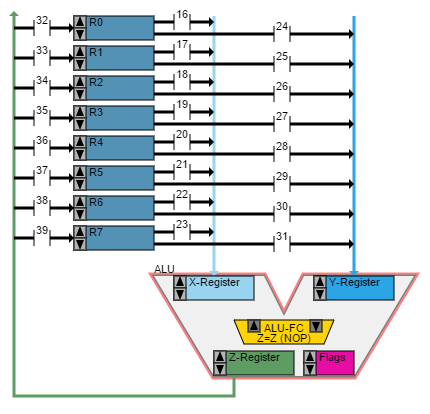
Bus-Schalter
- Bus-Schalter schalten alle Datenleitungen für ein Register gemeinsam (16 parallele Schalter mit einem gemeinsamen Steuersignal)
- Ein geöffneter Bus-Schalter wird durch zwei dünnere parallel Linien dargestellt
- Bei einem geschlossenem Bus-Schalter sind die dünneren parallelen Linien mit einem Bus verbunden
- Die Bus-Schalter bleiben für einen Takt lang in einer bestimmten Einstellung und sind ggf. in bestimmten Phasen des Taktes offen
- Die Stellung eines Schalters wird durch sein Steuersignal $s_j$ definiert, dabei ist der Index $j$ jeweils als Zahl leicht oberhalb des Schalters zu finden
- Die kleine Abbildung rechts zeigt den Bus-Schalter, der dem Steuerbit $s_{32}$ des Mikrobefehlsworts gehorcht
- Links geöffnet $s_{32}=0$, rechts geschlossen $s_{32}=1$
- Selbst ausprobieren:
- Öffnen des CPU-Simulators
- Klicken auf den Schalter 32 ändert dessen Schalterstellung und Steuerbit $s_{32}$
- Klicken auf ein Steuerbit ändert ebenfalls die Schalterstellung
CPU-Simulator: Komplexitätsstufe 1
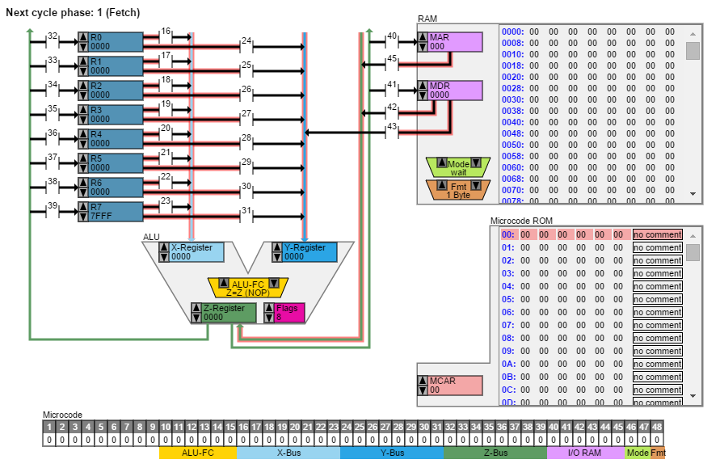
CPU-Simulator: Komplexitätsstufe 1
- Nun wurden alle Bauelemente beschrieben, um einen Taschenrechner mit einigen Speicherzellen (Registern) zu bauen
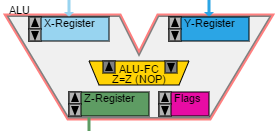
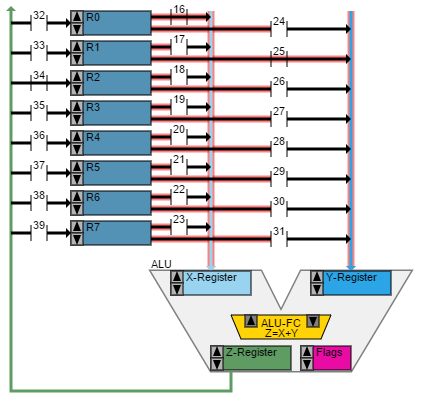
- Wir benötigen dazu zunächst eine ALU, eine Reihe von Registern (hier
R0, R1, ..., R7), Busse und Bus-Schalter
- Die ALU versehen wir mit zwei Operandenregistern,
X und Y, sowie einem Ergebnisregister Z
- Dann verbinden wir jedes Allzweckregister
R0, R1, ..., R7 über zwei Busse (dem X-Bus und dem Y-Bus) mit den entsprechenden Operandenregistern der ALU
- Das Ergebnisregister
Z der ALU wird über den Z-Bus mit den Allzweckregistern verbunden
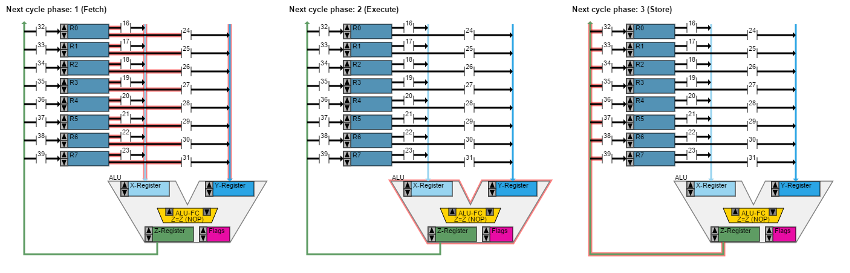
CPU-Simulator: Komplexitätsstufe 1
- Zwischen den Registern und den Bussen sitzen Schalter, die nur in bestimmten Phasen geöffnet werden können (
fetch, execute, store).
- Die Schalter zwischen den Allzweckregistern und dem X- und Y-Bus sind nur in der Hol-Phase
fetch aktiv
- Nur dann können die Daten von den Registern zu den Operandenregistern der ALU fließen
- In der zweiten Phase
execute rechnet die ALU und schreibt das Ergebnis in Z
- Nur in dieser Bring-Phase
store sind die Schalter zwischen Z-Bus und den Allzweckregistern aktiv,
damit das Ergebnis in einem der Register abgelegt werden kann
- Der komplette Aufbau ist in der Abbildung auf der nächsten Folie dargestellt
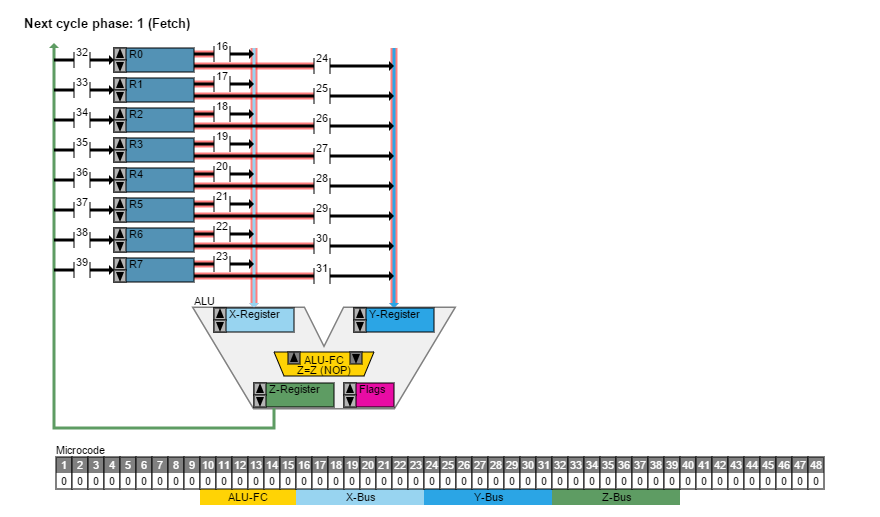
CPU-Simulator: Komplexitätsstufe 1
CPU-Simulator: Komplexitätsstufe 1
- Um zu verdeutlichen, in welcher Phase (
fetch, execute, store) welche Komponenten aktiv sind, werden diese bei Aktivität jeweils rot unterlegt
- Selbst ausprobieren:
- Öffnen des CPU-Simulators
- Klicken auf den Druckknopf "Next" aktiviert die nächste Phase
Mikrocodegesteuerte Operationen
- Schließlich muss noch an der ALU einstellt werden, welche Operation sie berechnen soll
- Wir nehmen an, dass unsere ALU ein Repertoire von 64 Operationen umfasst, so dass wir die Operation mit 6 Bit im Mikrobefehlswort einstellen können
- Diese 6 Bit steuern einen Multiplexer (dargestellt als symmetrisches Trapez) in der ALU, der die Operation auswählt
- Neben den grundlegenden arithmetischen, logischen und vergleichenden Operationen sind auch Operationen mit Konstanten möglich
- Diese dienen z.B. dazu, eine feste Konstante im Z-Register bereitzustellen
- Die ALU-Funktionscodes (
ALU-FC) sind in den folgenden Tabellen dargestellt
- In der Operations-Spalte wird angegeben, wie sich der Wert im Z-Register aus den Werten in den X- und Y-Registern ergibt
- Ggf. werden noch die Inhalte von X- und Y-Register einander zugewiesen bzw. vertauscht, was durch
Y → X bzw. durch X ↔ Y angedeutet wird
ALU Operationen
| ALU-FC (Dezimal) | ALU-FC (Binär) |
Operation |
| 0 | 000000 | $Z = Z$ (Keine Operation) |
| 1 | 000001 | $Z = -Z$ |
| 2 | 000010 | $Z = X$ |
| 3 | 000011 | $Z = -X$ |
| 4 | 000100 | $Z = Y$ |
| 5 | 000101 | $Z = -Y$ |
| 6 | 000110 | $Z = Y, X \leftrightarrow Y$ |
| 7 | 000111 | $Z = X, X \leftrightarrow Y$ |
| 8 | 001000 | $Z = X, Y \rightarrow X$ |
| 9 | 001001 | $Z = X +1 $ |
| 10 | 001010 | $Z = X - 1$ |
| 11 | 001011 | $Z = X + Y$ |
| 12 | 001100 | $Z = X - Y$ |
| 13 | 001101 | $Z = X \ast Y$ |
| 14 | 001110 | $Z = X \,\mbox{div}\, Y$ |
| 15 | 001111 | $Z = X \,\mbox{mod} \,Y$ |
ALU Operationen
| ALU-FC (Dezimal) | ALU-FC (Binär) |
Operation |
| 16 | 010000 | $Z = X \,\mbox{sal} \,Y$ (shift arithmetic left) |
| 17 | 010001 | $Z = X \,\mbox{sar} \,Y$ (shift arithmetic right) |
| 18 | 010010 | $Z = X \,\mbox{cmpa} \,Y$ (compare arithmetic) |
| 19 | 010011 | $Z = X \,\mbox{and} \,Y$ |
| 20 | 010100 | $Z = X \,\mbox{nand} \,Y$ |
| 21 | 010101 | $Z = X \,\mbox{or} \,Y$ |
| 22 | 010110 | $Z = X \,\mbox{nor} \,Y$ |
| 23 | 010111 | $Z = X \,\mbox{xor} \,Y$ |
| 24 | 011000 | $Z = X \,\mbox{nxor} \,Y$ |
| 25 | 011001 | $Z = X \,\mbox{sll} \,Y$ (shift logic left) |
| 26 | 011010 | $Z = X \,\mbox{slr} \,Y$ (shift logic right) |
| 27 | 011011 | $Z = X \,\mbox{cmpl} \,Y$ (compare logic) |
| 28 | 011100 | $X = 0$ |
| 29 | 011101 | $X = (\mbox{FFFF})_{16}$ |
| 30 | 011110 | $Y = 0$ |
| 31 | 011111 | $Y = (\mbox{FFFF})_{16}$ |
ALU Operationen
| ALU-FC |
Operation |
| Falls 32 ≤ ALU-FC < 48 | Z = X = ALU-FC - 32 |
Falls 48 ≤ ALU-FC < 64 | Z = Y = ALU-FC - 48 |
- Beispiele:
-
Für ALU-FC = 35 ergibt sich Z = X = 3
-
Für ALU-FC = 63 ergibt sich Z = Y = 15
Statusregister (Flags)
- Führt die ALU eine Berechnung durch, wird nicht nur das Ergebnis im Z-Register abgelegt, sondern auch das Flag-Register gesetzt
- Die ALU signalisiert damit, dass bestimmte Ereignisse bei der Berechnung aufgetreten sind
- In unserer Modell-CPU sind dies 4 verschiedene, daher ist das Flag-Register 4 Bit breit:
- Bit 0: Overflow einer arithmetischen Operation (overflow flag)
- Bit 1: Ergebnis war negativ (sign neg flag)
- Bit 2: Ergebnis war positiv (sign pos flag)
- Bit 3: Ergebnis war null (zero flag)
- Der Inhalt des Flag-Registers wird als Hexadezimal-Zahl dargestellt
- Beispiele:
- Flag = (5)16 = (0101)2, d.h. ein positives Ergebnis und Overflow sind aufgetreten
- Flag = (8)16 = (1000)2, d.h. das Ergebnis ist null
Beispiel: Addition zweier Zahlen
- Als Beispiel für die Verwendung der Modell-CPU soll die Addition zweier Register und die Speicherung des Ergebnisses betrachtet werden:
R3 = R1 + R2
- Dazu muss ALU-FC Nr. 11 = (001011)2 eingestellt sein
- Die Steuersignale für den X-Bus sind 10000000, für den Y-Bus 01000000 und für den Z-Bus 00100000
CPU-Simulator: Komplexitätsstufe 2
CPU-Simulator: Komplexitätsstufe 2
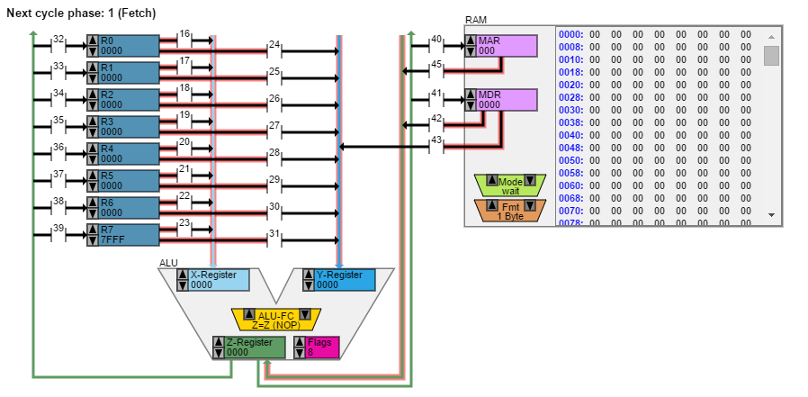
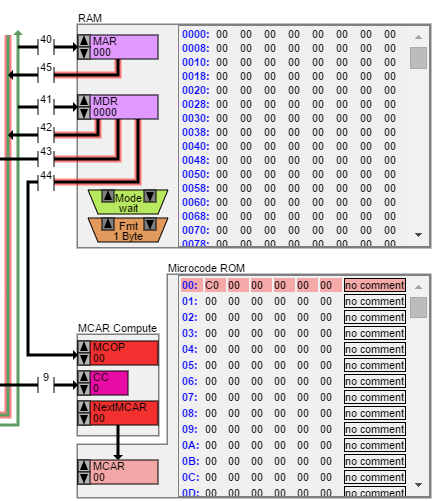
- Die CPU wird nun um einen Hautspeicher (RAM) erweitert
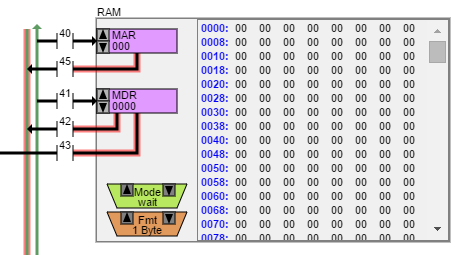
Hauptspeicher
- Der Hauptspeicher (engl. Random Access Memory kurz RAM) hat als Schnittstelle zwei Register, eine Formatangabe und einen einstellbaren Modus
- Bei den Registern handelt es sich um das Adressregister (
MAR = Memory Address Register) und das Datenregister (MDR = Memory Data Register)
- Wie bereits im Kapitel über Speicher besprochen, steht im Adressregister eine Speicheradresse und im Datenregister ein Wert, der an der angegebenen Adresse geschrieben werden soll oder von der angegebenen Adresse gelesen wurde
- Insgesamt umfasst der RAM Speicher 1024 Bytes, (000)16 bis (3FF)16
Mode und Format
- Um das RAM per Mikrocode anzusteuern, wird das Mikrobefehlswort erweitert
- Die Bits 40 bis 45 (
I/O RAM) steuern die Bus-Schalter der RAM-Register
- Die Bits 46 und 47 (
Mode) steuern den I/O Mode:
- 00 = wartend
- 01 = lesend
- 10 = schreibend
- Und Bit 48 (
Fmt), wählt das Datenformat (8 oder 16 Bit Lesen/Schreiben)
- 0 = 1 Byte Lesen/Schreiben
- 1 = 2 Byte Lesen/Schreiben
-
Beim Schreiben einer 8-Bit-Größe wird nur das niederwertige Byte aus dem
MDR an die Adresse [MAR] geschrieben.
- Beim Lesen werden die vorderen 8 Stellen des
MDR durch Nullen aufgefüllt
- Beim 16 Bit Lesen/Schreiben wird das Big-Endian-Format verwendet
Schreiben in den Hauptspeicher
- Es werden in der Regel zwei Takte benötigt
- Die Adresse im Hauptspeicher, an die geschrieben werden soll, wird meist mit Hilfe der ALU berechnet
- Im ersten Takt muss die Adresse, an die geschrieben werden soll, in Phase 3 über den Z-Bus in das Adressregister
MAR transportiert werden
- Im zweiten Takt muss der Datenwert, der in den Speicher geschrieben werden soll, in Phase 3 über den Z-Bus in das Datenregister
MDR transportiert werden
- Nach Takt 2, Phase 3 hat der Hauptspeicher die Schreiboperation durchgeführt
- Selbst ausprobieren:
- Öffnen des CPU-Simulators
- In der Combo-Box "Import example file" das Beispiel "Write to RAM" auswählen
- Das Beispiel schreibt (000F)16 an die Speicherstelle (008)16
Lesen vom Hauptspeicher
- Es werden in der Regel zwei Takte benötigt
- Im ersten Takt muss die Adresse, von der gelesen werden soll, in Phase 3 über den Z-Bus in das Adressregister
MAR transportiert werden
- Im zweiten Takt, Phase 1 steht der gelesene Wert im Datenregister
MDR zur Verfügung
- Die Daten des
MDR können wahlweise über den Y- bzw. über den Z-Bus in das Y- und/oder in das Z-Register übertragen werden
- Vom Z-Register aus können sie in Takt 2, Phase 3 in eines der Register geschrieben werden
- Vom Y-Register aus können sie in Takt 2, Phase 2 in der ALU weiterverarbeitet werden
- Selbst ausprobieren:
- Öffnen des CPU-Simulators
- In der Combo-Box "Import example file" das Beispiel "Read from RAM" auswählen
- Das Beispiel liest (0102)16 von der Speicherstelle (010)16
Idealisierter Hauptspeicher
- Der in unserer Modell-CPU verwendete Hauptspeicher liest und schreibt ohne Verzögerung
- Die ist eine idealisierte Annahme
- In der Realität kommt es häufig vor, dass der Speicher für die CPU zu langsam ist
- Die CPU muss ggf. ein oder mehrere Takte warten (waitstates), um dem Speicher Zeit zu geben, die Daten zu lesen bzw. zu schreiben
- Die Anzahl der benötigten Warte-Takte kann sehr unterschiedlich sein, je nachdem ob die Daten aus einem schnellen oder langsamen Cache
kommen oder womöglich sogar aus dem noch langsameren Hauptspeicher
- Während der Warte-Takte kann die CPU jedoch (falls möglich) andere unabhängige Berechnungen ausführen
CPU-Simulator: Komplexitätsstufe 3
CPU-Simulator: Komplexitätsstufe 3
- Die CPU wird nun um einen Mikrobefehlsspeicher erweitert
Der Mikrobefehlsspeicher
- Mikrobefehle sind Bitfolgen, die wie andere Daten auch in einem Speicher abgelegt werden können
- Ein solcher Mikrobefehlsspeicher ist Teil der CPU
- Der Speicher ist als ROM (Read-Only-Memory) ausgeführt, d.h. er kann nur gelesen, nicht aber von der CPU nicht verändert werden
- Ansonsten ist das ROM wie jeder andere Speicher aufgebaut, insbesondere besitzt es ein Adressregister, in dem die Adresse eines Speicherwertes abgelegt wird, und ein Datenregister, in dem der dort befindliche Datenwert zurückgegeben wird
- Weil die im ROM gespeicherten Daten als Mikrocode interpretiert werden, wird das Adressregister mit
MCAR (MicroCode Address Register) bezeichnet
- Das Datenregister ist im Simulator nicht als farbiges Rechteck dargestellt, da dessen Inhalt immer dem aktuellen Mikrocode entspricht,
dessen 48 Bits sowieso jeweils unten dargestellt werden
Der Mikrobefehlsspeicher
- Da in unserem CPU-Modell bis zu 256 Mikrobefehle im ROM speichern werden können, wird ein 8 Bit breites
MCAR benötigt
- Da jeder Mikrobefehl 48 Bits lang ist, wird das auf der CPU befindliche ROM eine Größe von 256 x 48 Bit = 1536 Bytes besitzen
- Wir können aber nicht jedes Byte adressieren, wie im RAM, sondern nur jeden Mikrobefehl, d.h. jeweils Worte mit 48 Bit
- Ändert sich das Mikrocode-Adressregister wird das entsprechende Mikrocodewort gelesen und dessen Bits beeinflussen sofort als Steuersignale
die Bus-Schalter und Multiplexer der restlichen CPU
- Mit dem ROM kann die CPU nun komplexere Operationen über mehrere Takte ausführen, indem nach jedem Takt ein anderes Mikrocodewort aus
dem ROM-Speicher angewendet wird
- Zur Zeit muss das Mikrocode-Adressregister dazu noch von Hand erhöht werden
Der Mikrobefehlsspeicher
- Beispiel: [5,6] = R1 + [5,6]
| Takt 1 | Phase 1 | keine Operation | |
| Phase 2 | Z = 5 | ALU-FC: 100101 |
| Phase 3 | MAR = Z | I/O RAM: 100000
Mode: 01, Format: 1 |
| Takt 2 | Phase 1 | RAM ließt Inhalt von [5,6] ins MDR | Mode: 01, Format: 1 |
| Phase 2 | keine Operation | ALU-FC: 000000 |
| Phase 3 | keine Operation | I/O RAM: 000000 |
| Takt 3 | Phase 1 | Y = MDR, X = R1 | X-Bus: 01000000 |
| Phase 2 | Z = X + Y | ALU-FC: 001011 |
| Phase 3 | MDR = Z, RAM schreibt | I/O RAM: 010100
Mode: 10, Format: 1 |
- Selbst ausprobieren:
Im CPU-Simulator das Beispiel "Modify RAM: [5] = R1 + [5]" auswählen
CPU-Simulator: Komplexitätsstufe 4
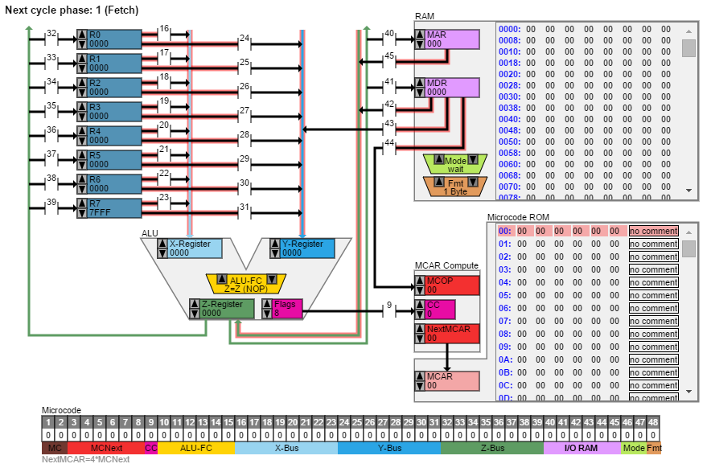
CPU-Simulator: Komplexitätsstufe 4
- Die CPU wird nun um einen Adressrechner für den Mikrobefehlsspeicher erweitert
Sprünge im Mikrobefehlsspeicher
- Die im ROM befindlichen Befehle könnten von der CPU der Reihe nach abgearbeitet werden
- Das wäre aber sehr eintönig und sinnlos, denn dann würde immer dasselbe Programm ablaufen, da der Inhalt des ROM ja unveränderbar ist
- Daher ist die Modell-CPU so konstruiert, dass wir jeweils beliebige Mikrocode-Adressen in das
MCAR schreiben können, um somit
beliebige Sprünge im Mikrocode zu realisieren
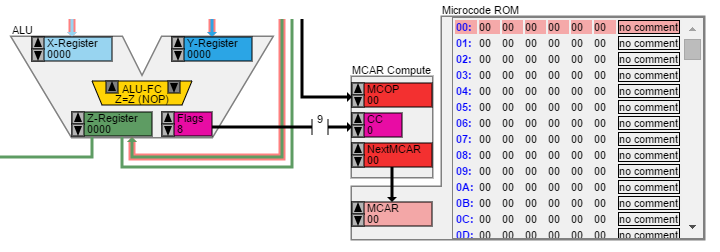
- Während die CPU den gegenwärtigen Mikrobefehl noch bearbeitet, berechnet die Adressberechnungseinheit "MCAR Compute"
daraus die Adresse des nächsten Mikrobefehls im ROM und speichert das Ergebnis im
NextMCAR Register
- Der Wert von
NextMCAR wird dann kurz vor Beginn des nächsten Taktes in das MCAR Register übertragen
- Der nächste auszuführende Mikrobefehl wird dann aus dem ROM gelesen, liegt zu Beginn des nächsten Taktes vor und steuert die CPU
- Für die Adressberechnungseinheit muss die Hardware der CPU um eine zusätzliche spezialisierte ALU erweitert werden. Sie wurde im CPU-Simulator
aus Gründen der Übersichtlichkeit nicht explizit als ALU dargestellt.
Sprünge im Mikrobefehlsspeicher
- Es werden folgende Fälle unterschieden:
- Das Sprungziel steht von vornherein fest
- Das Sprungziel ergibt sich als Wert einer Berechnung mit einer speziellen ALU
- Das Sprungziel ergibt sich indirekt aus dem Inhalt des Speichers
- Das Sprungziel ergibt sich aufgrund einer Bedingung, die aus dem Flag-Register der CPU-ALU ablesbar ist
Sprünge im Mikrobefehlsspeicher
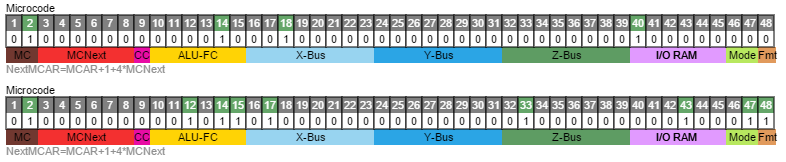
- Bits 1 bis 8 des Mikrobefehlworts bestimmen, welcher Befehl als nächster auszuführen ist
- Bit 1 und 2 werden mit
MC bezeichnet
MC=00: absoluter Sprung: NextMCAR = 4 * MCNextMC=01: relativer Sprung vorwärts: NextMCAR = MCAR + 1 + 4 * MCNextMC=10: relativer Sprung rückwärts: NextMCAR = MCAR + 1 - 4 * MCNextMC=11: OpCode-gesteuerte und bedingte Sprünge: (später)
- Bits 3 bis 8 werden mit
MCNext bezeichnet und kodieren das Sprungziel
- Mit 6 Bits erhält man 26=64 mögliche Werte
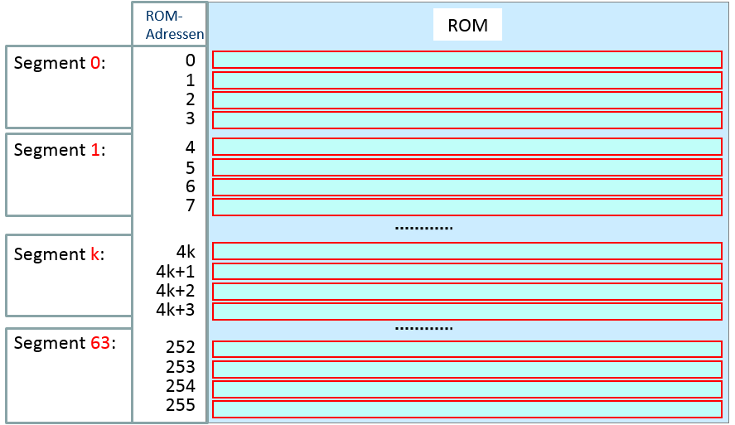
- Um diese etwas besser über den Speicher zu verteilen, wird
MCNext mit 4 multipliziert
- Auf diese Weise ergibt sich eine logische Gruppierung von je 4 aufeinander folgenden Mikrocodeadressen zu einem Segment
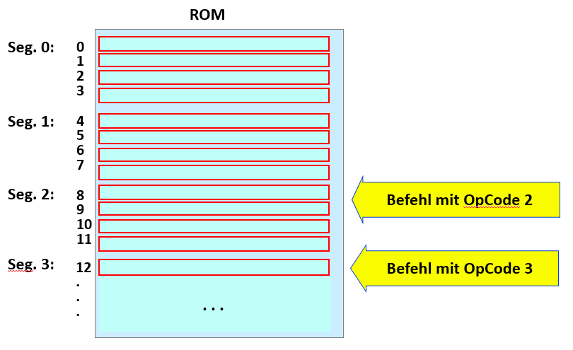
Absolute Sprünge
- Je 4 ROM-Adressen werden zu einem Segment zusammengefasst
- Absolute Sprünge (
MC=00) sind nur an den Segmentanfang möglich
Relative Sprünge
- Im Sprungmodus
MC=01 wird ein Vorwärtssprung relativ zum gegenwärtigen MCAR ausgeführt.
Die Adresse des neuen Befehls ergibt sich aus:
NextMCAR = MCAR + 1 + 4 * MCNext
- Im Sprungmodus
MC=10 wird ein Rückwärtssprung relativ zum gegenwärtigen MCAR ausgeführt.
Die Adresse des neuen Befehls ergibt sich aus:
NextMCAR = MCAR + 1 - 4 * MCNext
- Würde in den obigen Fällen die +1 fehlen, so könnte man immer nur Befehle am Anfang eines Segments erreichen
- Wenn
MCNext = 0 ist, führen die beide relativen Sprungarten zum jeweils nächsten Befehl
- Selbst ausprobieren:
- Automatisierung der Abarbeitung des vorherigen Beispiels
[5,6] := R1 + [5,6]
- Im CPU-Simulator das Beispiel "Modify RAM with MCNext" auswählen
OpCode-gesteuerte und bedingte Sprünge
- Auch mit den bisher behandelten Möglichkeiten, Sprünge zu programmieren, ist das Mikroprogramm noch nicht von außen beeinflussbar
- Diese Möglichkeit wird dadurch geschaffen, dass sich Sprünge im Mikrobefehlsspeicher von dem Inhalt des RAM Speichers oder
von Ergebnissen von Operationen beeinflussen lassen
- Beides ist im Sprungmodus
MC=11 möglich
OpCode-gesteuerte Sprünge
- Computer werden durch Programme gesteuert, die aus Befehlen in Maschinensprache bestehen
- Diese Maschinenbefehle befinden sich gemeinsam mit Daten im RAM
- Jeder einzelne Maschinenbefehl besteht aus einem OpCode und ggf. weiteren Parametern
- Ein Maschinenbefehl wird bei der Modell-CPU durch ein Mikroprogramm implementiert, das einige Mikrocodewörter umfassen
kann und sich im Mikrobefehlsspeicher befindet
- Der OpCode gibt, an wo sich dieser Befehl im Mikrobefehlsspeicher befindet
- Daher werden OpCode-gesteuerte Sprünge im Mikrobefehlsspeicher benötigt
OpCode-gesteuerte Sprünge
- Für OpCode-gesteuerte Sprünge wird das
MCOP Register verwendet, in das die Adresse des auszuführenden Sprungs von außen hineingeschrieben werden soll
- Für diesen Zweck gibt es einen Datenpfad vom Datenregister des Speichers zum Register MCOP
- Dieser Pfad kann über den
I/O RAM Bus-Schalter $s_j=44$ geöffnet oder geschlossen werden
- Falls
MC=11 ist und MCNext mit den Bits 00 beginnt, dann wird die Adresse für den nächsten Mikrobefehl so ermittelt:
NextMCAR = 4 * MCOP
Bedingte Sprünge
- Letztendlich sollen auch Maschinenbefehle implementiert werden, die sich abhängig vom ALU Statusregister
Flags anders verhalten
- Dazu müssen bedingte Sprünge im Mikrocode ausgeführt werden, die sich auf den Inhalt des Statusregisters beziehen
- Manchmal ist es erwünscht, die aktuellen Flags zu benutzen, manchmal die Flags aus einem vorangegangenen Befehl
- Beides ist möglich. Dazu dient ein zusätzliches Condition-Code-Register
CC
- Nur wenn Bus-Schalter 9 gesetzt ist, wird der Inhalt von
Flags nach CC übernommen
Bedingte Sprünge
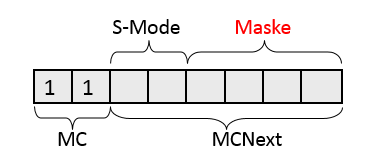
- Die Bedingung für bedingte Sprünge wird mit Hilfe einer Maske ausgewertet
- Falls
MC=11 ist, wird MCNext in S-Mode und Maske zerlegt
- Der Fall
S-Mode = 00 liefert einen OpCode-gesteuerten Sprung und wurde bereits besprochen
- Andernfalls bei
S-Mode ≠ 00 werden die vier Bits des CC-Registers mit den vier Bits von Maske über ein logisches AND verknüpft
- Ist das Ergebnis ungleich 0000, so wird der Sprung zur OpCode-Adresse ausgeführt:
NextMCAR = 4 * MCOP
- Ist das Ergebnis gleich 0000, geht es mit dem nächsten Mikrobefehl weiter:
NextMCAR = MCAR + 1
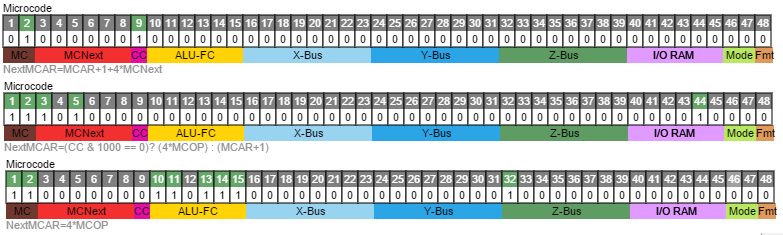
Zusammenfassung: Sprünge im Mikrobefehlsspeicher
| Sprungmode | Sprungziel |
|---|
MC=00 | NextMCAR = 4 * MCNext |
MC=01 | NextMCAR = MCAR + 1 + 4 * MCNext |
MC=10 | NextMCAR = MCAR + 1 - 4 * MCNext |
MC=11 | Zerlege MCNext in S-Mode (2 Bit) und Maske (4 Bit) |
Für Sprungmode MC=11 gilt folgende Tabelle:
S-Mode | Sprungziel |
|---|
S-Mode=00 | NextMCAR = 4 * MCOP |
S-Mode ≠ 00 | NextMCAR = 4 * MCOP falls (Maske AND CC) ≠ 0000
NextMCAR = MCAR + 1 falls (Maske AND CC) = 0000
|
Mikroprogramm "Kleiner Gauss"
Mikroprogramm "Kleiner Gauss"
| 00: | Initialisiere R0,..., R7 und MAR mit 0 |
| Phase 1 | keine Operation |
| Phase 2 | Z = 0 |
| Phase 3 | R1...R7 = 0, MAR = 0 |
 |
| 01: | Lese $N$ aus [00H] und speichere $N$ in R0 |
| Phase 1 | Speicher liest, Y = MDR |
| Phase 2 | Z = Y |
| Phase 3 | Z = R0 |
 |
Mikroprogramm "Kleiner Gauss"
| 02: | MDR = 1 (Sprungvorbereitung) |
| Phase 1 | keine Operation |
| Phase 2 | Z = 1 |
| Phase 3 | MDR = Z0 |
 |
| 03: | MCOP = MDR (noch Sprungvorbereitung) |
| Phase 1 | MCOP = MDR |
| Phase 2 | keine Operation |
| Phase 3 | keine Operation |
 |
Mikroprogramm "Kleiner Gauss"
| 04: | Addiere R0 zu R2 |
| Phase 1 | X = R0, Y = R2 |
| Phase 2 | Z = X + Y |
| Phase 3 | R2 = Z |
 |
| 05: | Dekrementiere R0 und springe zu 4 * MCOP = 04, falls Ergebnis > 0 |
| Phase 1 | X = R0 |
| Phase 2 | Z = X – 1 |
| Phase 3 | R0 = Z |
 |
Vom Mikroprogramm zu Maschinenbefehlen
- Die Vorstellung, größere Programme in Mikrocode programmieren zu müssen, ist abschreckend
- Außerdem ist die CPU per Mikrocode-Programmierung nicht univeral einsetzbar, da der Inhalt des ROMs unveränderbar ist
- Programmierer sollten sich nicht damit plagen müssen, Schalter in Datenwegen zu betätigen, Daten mühsam
via Adress- und Datenregister aus dem Speicher zu lesen, Code-Adressen in Code-Adress-Register zu schreiben oder ähnliche lästige Dinge festzulegen
- Die Details der Benutzung der Busse und der zeitlichen Abfolge der Teilschritte in den einzelnen Phasen sollen dem Programmierer ebenfalls verborgen bleiben
- Eine abstraktere Programmierschnittstelle für die CPU: Maschinenbefehle
- Diese abstrakte Sicht der CPU zeigt immer noch Register und RAM, verschwunden sind aber Busse, ALU, Adressrechner, Phasen und Bus-Schalter
- Maschinenbefehle erlauben, Operationen direkt auf Registerinhalten durchzuführen und Daten zwischen Registern und RAM zu verschieben
- Außerdem gibt es Maschinenbefehle, die direkte Sprünge zu besonders gekennzeichneten Code-Stellen bewirken, anstatt dass mühsam aus
Sprungmode und Masken Programmverzweigungen hergestellt werden müssen
Maschinensprache
- Die Maschinensprache einer CPU ist die Menge von Maschinenbefehlen, die einem Programmierer zur Verfügung steht
- Einige typischer Maschinenbefehle haben die Formen:
Op R1, R2Op R1, WOp R1, [Adresse]
- Dabei ist
-
Op: eine Operation
-
R: ein Register
-
W: ein konstanter Wert
-
[Adresse]: eine Speicheradresse im RAM
Maschinensprache
- Beispiele:
| Maschinenbefehl | Bedeutung |
|---|
Add R1, R2 | R1 = R1 + R2 |
Mov R1, R2 | R1 = R2 |
Sub R1, 2 | R1 = R1 - 2 |
Mov R1, 2 | R1 = 2 |
Add R1, [61h] | R1 = R1 + Inhalt von RAM Speicheradresse (61)16 |
Mov R1, [61h] | R1 = Inhalt von RAM Speicheradresse (61)16 |
Mov [42h], R2 | Schreibe Inhalt von R2 an RAM Speicheradresse (42)16 |
Sprünge in Maschinensprache
- Ein absoluter Sprungbefehl lautet:
Jmp Adresse
wobei Adresse eine RAM Speicheradresse ist, an der der nächste
auszuführende Befehl beginnt
- Bedingte Sprünge bestehen aus einer
Vergleichsoperation mit anschließender�Sprunganweisung, die auf dem Ergebnis des Vergleichs basiert
Op R1 , R2
CondJmp Adresse
- Jede Operation, die die Flags der ALU beeinflusst,
kann als Vergleichsoperation dienen
- Die Sprungbedingung ergibt sich aus den Flags
- Meist werden die Flags mit einer Maske �ausgewertet. Masken für typische Sprünge
sind meist durch Buchstaben codiert, z.B.:
JLE: "Jump if less equal" ("Springe bei kleiner gleich")
-
Beispiel:
Sub R1, R2
JLE 127
Registerkonvention
- Die Operanden von Maschinenbefehlen sind Register oder RAM Speicherplätze
- Es dürfen aber nie beide Operanden RAM Speicherplätze sein
- Die Register werden für bestimmte Zwecke reserviert, etwa als Programmzähler, als Zeiger auf den Stack oder den Datenbereich
- Einige Register behält man als Rechenregister. Diese werden häufig Allzweckregister oder Akkumulatoren genannt.
Viele Befehle der Maschinensprache sind nur mit Allzweckregistern durchführbar
- Beispiel für eine Registerkonvention für unsere Modell-CPU:
| Register | Vereinbarter Zweck |
|---|
| R0 | Programmzähler (Program Counter) PC |
| R1 | Akkumulator A |
| R2 | Akkumulator B |
| R3 | Loop Index I |
| R4 | Hilfsregister Aux |
| R5 | I/O Port |
| R6 | Data Pointer |
| R7 | Stack Pointer |
Mikroprogrammierte Maschinenbefehle
- Jeden Maschinensprachebefehl können wir durch ein kurzes Mikroprogramm implementieren
ADD A, B
ADD A, [B]
Mov A, 7
Mikroprogrammierte Maschinenbefehle
- Jump if not zero
- Falls das Ergebnis der vorigen Operation = 0, führe den nächsten Maschinenbefehl aus (MCOP sei dafür
entsprechend gesetzt), sonst setze
PC (R0) auf 7 (Sprung!)
JNZ 7
Der Maschinensprache-Interpreter
- Jeder Maschinensprachebefehl erhält eine Nummer, den OpCode
- Er wird als kurze Mikrocoderoutine im ROM abgelegt
- Die Routine beginnt immer am Anfang eines Segments
- Der OpCode ist identisch mit der Segmentnummer
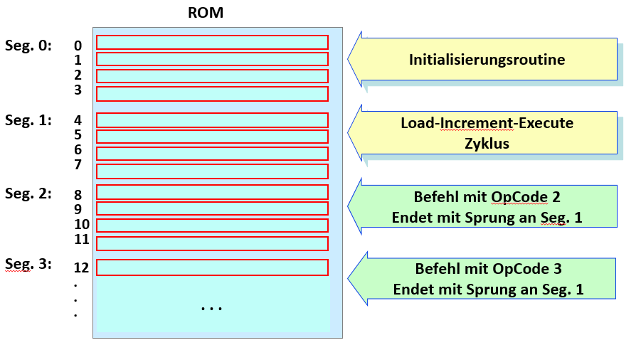
Der Maschinensprache-Interpreter
- Ein Interpreter für Maschinensprache:
- Segment 0 enthält Initialisierungsbefehle
- Segment 1 enthält einen Load-Increment-Execute-Zyklus
- Jeder Maschinensprachebefehl endet mit einem Sprung an den Anfang von Segment 1
Load-Increment-Execute-Zyklus
- Der Load-Increment-Execute-Zyklus besteht aus 2 Mikrobefehlen:
| 04: | Lade den Programmzähler |
| Phase 1 | X = R0 |
| Phase 2 | Z = X |
| Phase 3 | MAR = Z |
 |
| 05: | Jump Execute |
| Phase 1 | MCOP = MDR (Lies 1 Byte Opcode) |
| Phase 2 | Z = X + 1, MCAR = 4 * MCOP |
| Phase 3 | R0 = Z, MAR = Z |
 |
Load-Increment-Execute-Zyklus
- Achtung: Die Befehle des Load-Increment-Execute-Zyklus dürfen keine Flags verändern, da die Flags evtl. vom nächsten Maschinenbefehl benötigt werden
- Das
CC-Bit $s_j=9$ muss also auf 0 gesetzt werden, damit die Befehle Z = X und
Z = X + 1 das CC-Register nicht beeinflussen können
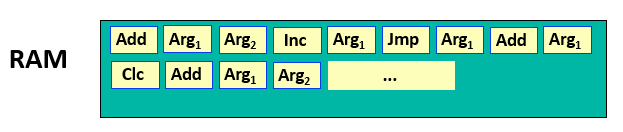
Maschinencode im RAM
- Während das Mikroprogramm im ROM fest vorgegeben und nicht veränderbar ist, kann im RAM ein Programm in Form von Maschinenbefehlen zusammen mit seinen Argumenten liegen
- Der Load-Increment-Execute-Zyklus führt dieses Programm aus
- Jeder Maschinenbefehl, der Argumente benötigt, kann bei seiner Implementierung als Mikrocode davon ausgehen, dass MAR auf das erste benötigte Argument zeigt
- Die Implementierung jedes Maschinenbefehls muss garantieren, dass hinterher der Programmzähler
PC auf der Speicheradresse des Opcodes des nächsten Befehls im RAM steht
- Selbst ausprobieren:
Im CPU-Simulator das Beispiel "Load-Increment-Execute cycle" auswählen
Entwicklung eines Maschinenspracheprogramms
- 1. Schritt: Java-Program
// Kleiner Gauss: Berechne die Summe aller Zahlen von 1 bis N
static int gauss(int n) {
int sum = 0;
while (n > 0) {
sum += n;
n--;
}
return sum;
}
- 2. Schritt: Ersetze Programmstrukturen durch Sprünge (Linearisiere das Programm)
int sum = 0;
loop: if(n == 0) goto end;
sum = sum + n ;
n = n - 1;
goto loop
end:
}
Entwicklung eines Maschinenspracheprogramms
- 2. Schritt: Ersetze Programmstrukturen durch Sprünge (Linearisiere das Programm)
int sum = 0;
loop: if(n == 0) goto end;
sum = sum + n ;
n = n - 1;
goto loop
end:
}
- 3. Schritt: Wähle Register oder Speicherplätze für die Variablen, benutze Assemblerbefehle
// Registerbelegung: sum --> A, n --> B
MOV A, 0
loop: CMP B, 0
JE end
ADD A,B
DEC B
JMP loop
end: STOP
Entwicklung eines Maschinenspracheprogramms
Entwicklung eines Maschinenspracheprogramms
- 5. Schritt:
- a) Übertrage das Programm in das RAM. Im ersten Durchlauf bleiben Sprungadressen noch offen
- b) Trage die richtigen Sprungadressen durch "Backpatching" nach:
- Selbst ausprobieren:
Im CPU-Simulator das Beispiel "Small Gauss (machine-code version)" auswählen
Abstraktionsebenen
- Im Laufe der bisherigen Vorlesungen haben wir mehrere aufeinander aufbauende Abstraktionsebenen kennen gelernt
- CMOS Transistor Schaltungen
- Logik Gatter
- ALU, Register, Bus-Schalter
- Mikrocode
- Maschinenbefehle
- Diese Abstraktionsebenen sind wichtig, um sich als Hardware-Designer bzw. beim hardware-nahen Programmieren, auf die
aktuelle Aufgabe zu fokussieren
Gibt es Fragen?
Anregungen oder Verbesserungsvorschläge können auch gerne per E-mail
an mich gesendet werden: Kontakt
Weitere Vorlesungsfolien